Для чего нужны перемычки на жестком диске и как правильно их устанавливать?

Всем привет! Если вы хоть раз внимательно рассматривали компоненты компьютера, то могли заметить перемычки на жестком диске, или так называемые джамперы. В сегодняшней публикации рассмотрим, для чего должна стоять перемычка на жестком диске компьютера или ноутбука, зачем они применяются, как правильно и где поставить данный компонент и нужно ли это.
Для чего и зачем нужны перемычки на HDD
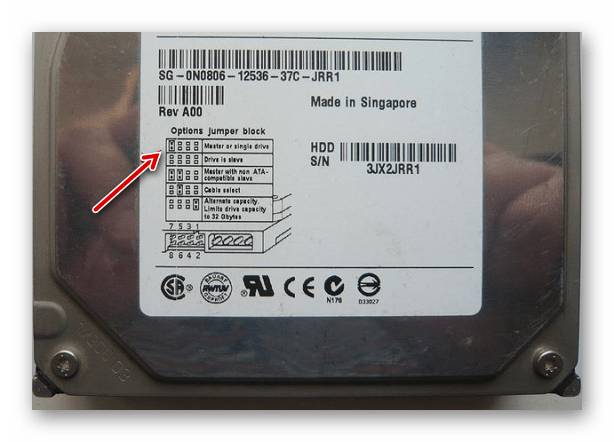
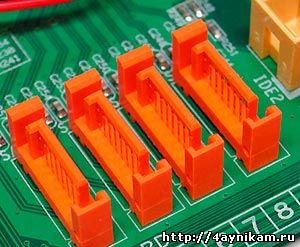
Джамперы на жестком диске SATA или IDE обычно размещены на тыльной кромке устройства, рядом со слотами для подключения шлейфов питания и передачи информации.
Ставить джампер на жесткий диск надо было на HDD формата IDE, если их два или более. В силу особенностей конфигурации этого протокола Windows не определяет, какой из накопителей является приоритетным при загрузке.
В положение Мастер надо установить джампер на накопителе, который используется как основной, то есть тот, где установлена операционная система и данные с которого должны загружаться первыми.
Обозначение Slave (переводится как «раб») соответствует «ведомому» винчестеру, то есть тому, который используется как дополнительный накопитель.
За что отвечает перемычка на SATA винчестерах?
На жестких дисках SATA — WD, Seagate, Toshiba, Samsung и прочих брендов, необходимость в джампере сведена к минимуму, так как ее назначение немного отличается.
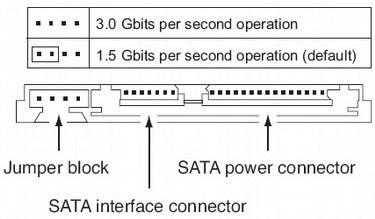
Из-за более совершенного протокола система сама определяет приоритетность загрузки данных. На винчестерах SATA 2 джемперы используются для понижения скорости передачи информации — в замкнутом положении уменьшают ее с 300 Мбит/с до 150 Мбит/с.
Данное техническое решение применяется, чтобы обеспечить обратную совместимость с некоторыми контроллерами САТА. Замечу, что такое ограничение «на глаз» почти не заметно и на скорость работы девайса практически не влияет. Такие же конструкционные элементы, ограничивающие скорость, могут использоваться и в современных накопителях SATA3, но необходимости в них нет.
Основная функция перемычки на IDE-дисках
Как я уже указал выше, на накопителях этого формата джампер используется для установки ведущего и ведомого HDD. Если вы не сильно разбираетесь в терминологии и конструкции ПК, то определить подобный накопитель очень просто: в них применяется широкий шлейф для подключения к материнской плате — если мне не изменяет память, не менее 10 см.
Про память я упомянул не случайно — мне компьютеры с такими дисками очень давно не попадались. Это совсем уже устаревший формат, используемый еще в некоторых рабочих компьютерах, менять которые на более производительные нет необходимости.
Как поставить перемычки на жесткий диск
Инструкция, куда устанавливать правильно джамперы, обычно наклеена рядом на тыльной кромке. Учитывайте, что у разных марок накопителей перемычки могут подключаться по-разному. Чтобы установить положение «Мастер» или «Слейв», нужно с помощью джампера замкнуть пару соответствующих перемычек, отмеченных на схеме.
Подписывайтесь на меня в социальных сетях и обязательно поделитесь этой публикацией. До следующей встречи!
Зачем нужна перемычка на жестком диске

Одной из деталей жесткого диска является перемычка или джампер. Она была важной частью устаревших HDD, работающих в режиме IDE, но ее можно встретить и в современных винчестерах.
Предназначение джампера на жестком диске
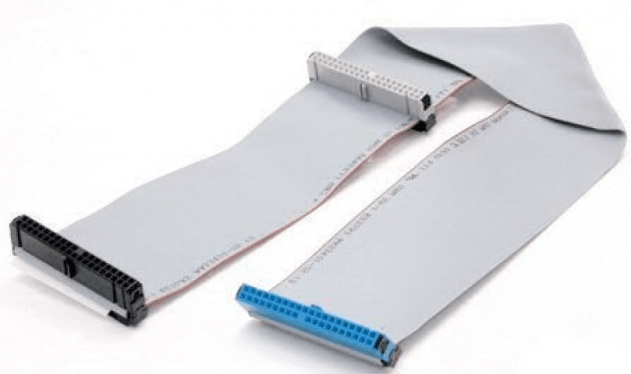
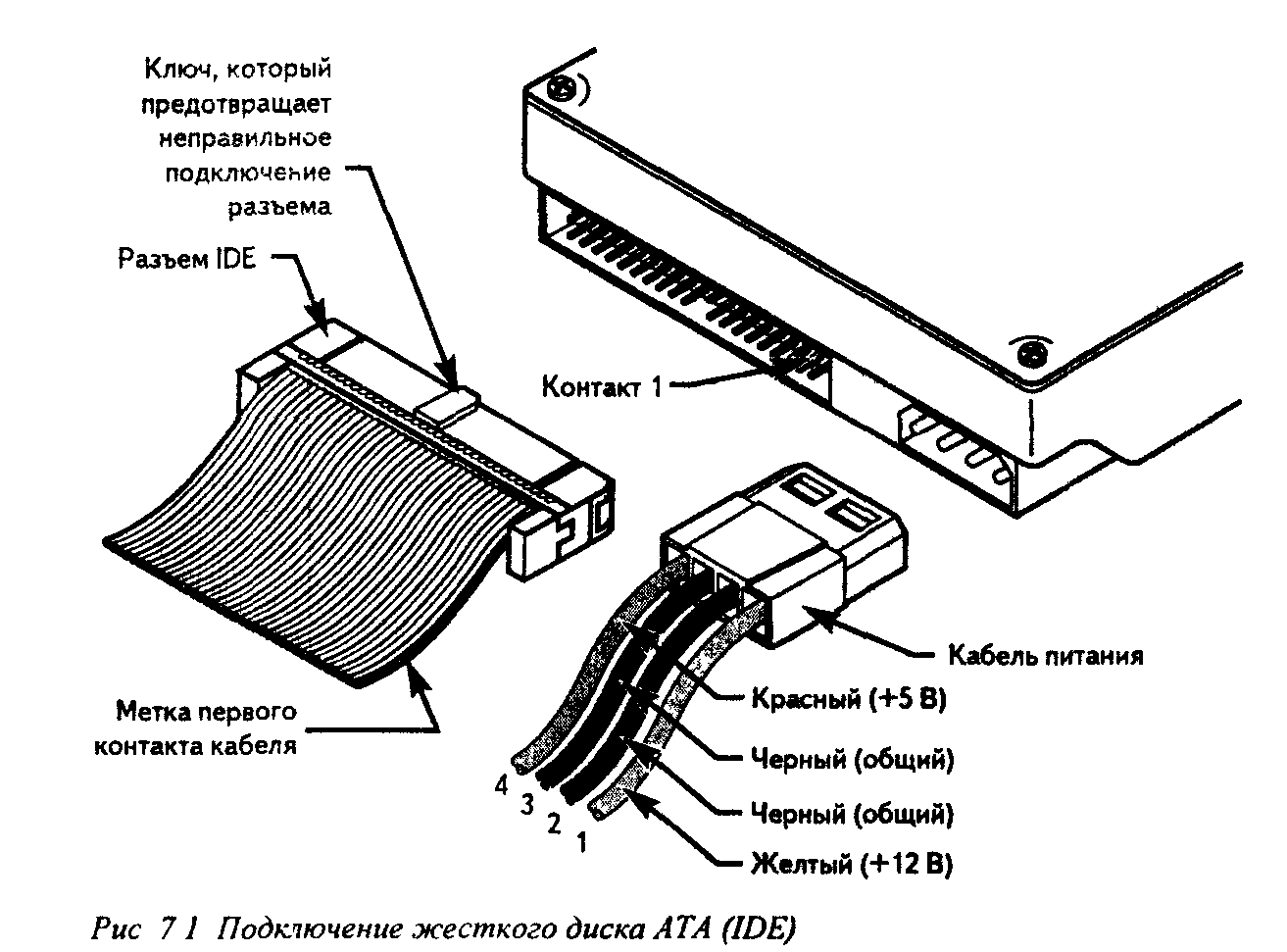
Несколько лет назад жесткие диски поддерживали режим IDE, который на сегодняшний день считается устаревшим. Они подключаются к материнской плате посредством специального шлейфа, поддерживающего два диска. Если на материнской плате два порта для IDE, то подключить можно до четырех HDD.
Выглядит этот шлейф следующим образом:
Основная функция перемычки на IDE-дисках
Для того, чтобы загрузка и работа системы были корректными, подключенные диски требуется предварительно сконфигурировать. Сделать это можно при помощи этой самой перемычки.
Задачей джампера является обозначение приоритета каждого из дисков, подключенного к шлейфу. Один винчестер всегда должен быть ведущим (Master), а второй — подчиненным (Slave). При помощи перемычки для каждого диска и задается предназначение. Основной диск с установленной операционной системой — Master, а дополнительный — Slave.
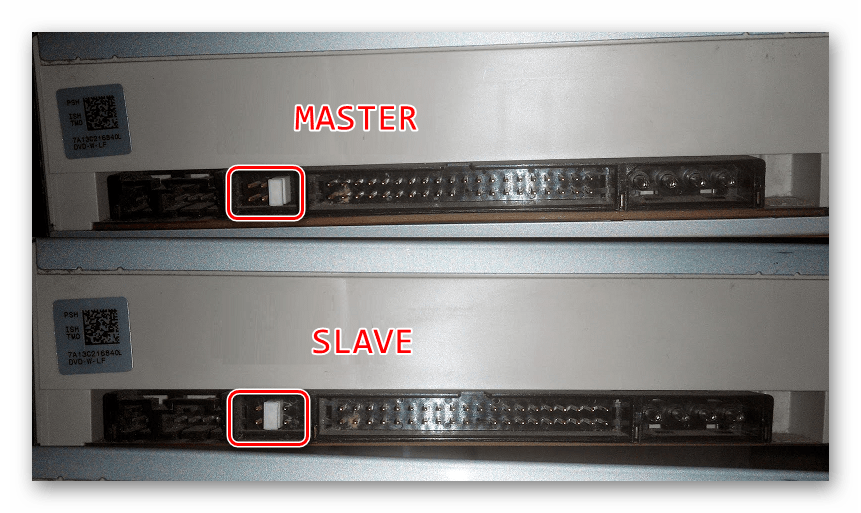
Чтобы выставить правильное положение джампера, на каждом HDD имеется инструкция. Выглядит она по-разному, но найти ее всегда очень легко.
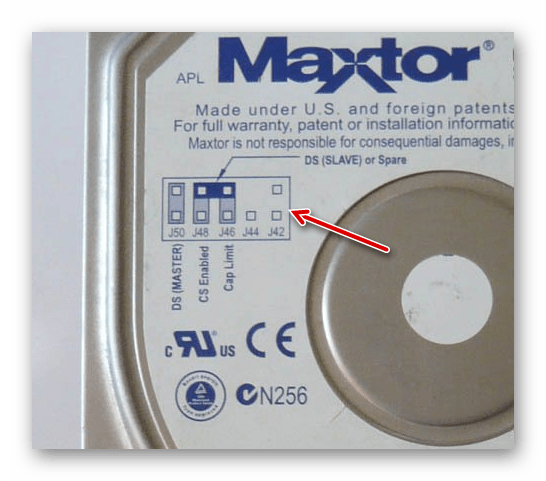
На этих изображениях вы можете видеть пару примеров инструкции к джамперу.
Дополнительные функции перемычки у IDE-дисков
Помимо основного предназначения у джампера существует и несколько дополнительных. Сейчас они также утратили актуальность, но в свое время могли быть необходимы. Например, установив перемычку в определенное положение, можно было подключать режим мастера с устройством без опознания; использовать иной режим работы со специальным кабелем; ограничивать видимый объем накопителя до определенного количества ГБ (актуально, когда старая система не видит HDD из-за «большого» количества дискового пространства).
Такие возможности есть не у всех HDD, и их наличие зависит от конкретной модели устройства.
Перемычка на SATA-дисках
Джампер (или место для его установки) присутствует и на SATA-накопителях, однако его предназначение отличается от IDE-дисков. Необходимость в назначении винчестера Master или Slave отпала, и пользователю достаточно просто соединить HDD с материнской платой и блоком питания при помощи кабелей. А вот пользоваться перемычкой может потребоваться в очень редких случаях.

У некоторых SATA-I присутствуют джамперы, которые в принципе не предназначены для действий пользователя.
У определенных SATA-II джампер может иметь уже замкнутое состояние, в котором понижается скорость работы устройства, в итоге она равна SATA150, но может быть и SATA300. Это применяется, когда есть необходимость в обратной совместимости с определенными SATA-контроллерами (например, встроенными в чипсеты VIA). Стоит отметить, что такое ограничение практически не влияет на эксплуатацию устройства, разница для пользователя практически неощутима.
В SATA-III также могут быть перемычки, ограничивающие скорость работы, но обычно в этом нет необходимости.
Теперь вы знаете, для чего предназначена перемычка на жестком диске разных типов: IDE и SATA, и в каких случаях ею необходимо пользоваться.
Как ставить джампер на жестком диске sata
Одной из деталей жесткого диска является перемычка или джампер. Она была важной частью устаревших HDD, работающих в режиме IDE, но ее можно встретить и в современных винчестерах.
Предназначение джампера на жестком диске
Несколько лет назад жесткие диски поддерживали режим IDE, который на сегодняшний день считается устаревшим. Они подключаются к материнской плате посредством специального шлейфа, поддерживающего два диска. Если на материнской плате два порта для IDE, то подключить можно до четырех HDD.
Выглядит этот шлейф следующим образом:
Основная функция перемычки на IDE-дисках
Для того, чтобы загрузка и работа системы были корректными, подключенные диски требуется предварительно сконфигурировать. Сделать это можно при помощи этой самой перемычки.
Задачей джампера является обозначение приоритета каждого из дисков, подключенного к шлейфу. Один винчестер всегда должен быть ведущим (Master), а второй — подчиненным (Slave). При помощи перемычки для каждого диска и задается предназначение. Основной диск с установленной операционной системой — Master, а дополнительный — Slave.
Чтобы выставить правильное положение джампера, на каждом HDD имеется инструкция. Выглядит она по-разному, но найти ее всегда очень легко.
На этих изображениях вы можете видеть пару примеров инструкции к джамперу.
Дополнительные функции перемычки у IDE-дисков
Помимо основного предназначения у джампера существует и несколько дополнительных. Сейчас они также утратили актуальность, но в свое время могли быть необходимы. Например, установив перемычку в определенное положение, можно было подключать режим мастера с устройством без опознания; использовать иной режим работы со специальным кабелем; ограничивать видимый объем накопителя до определенного количества ГБ (актуально, когда старая система не видит HDD из-за «большого» количества дискового пространства).
Такие возможности есть не у всех HDD, и их наличие зависит от конкретной модели устройства.
Перемычка на SATA-дисках
Джампер (или место для его установки) присутствует и на SATA-накопителях, однако его предназначение отличается от IDE-дисков. Необходимость в назначении винчестера Master или Slave отпала, и пользователю достаточно просто соединить HDD с материнской платой и блоком питания при помощи кабелей. А вот пользоваться перемычкой может потребоваться в очень редких случаях.
У некоторых SATA-I присутствуют джамперы, которые в принципе не предназначены для действий пользователя.
У определенных SATA-II джампер может иметь уже замкнутое состояние, в котором понижается скорость работы устройства, в итоге она равна SATA150, но может быть и SATA300. Это применяется, когда есть необходимость в обратной совместимости с определенными SATA-контроллерами (например, встроенными в чипсеты VIA). Стоит отметить, что такое ограничение практически не влияет на эксплуатацию устройства, разница для пользователя практически неощутима.
В SATA-III также могут быть перемычки, ограничивающие скорость работы, но обычно в этом нет необходимости.
Теперь вы знаете, для чего предназначена перемычка на жестком диске разных типов: IDE и SATA, и в каких случаях ею необходимо пользоваться.

Мы рады, что смогли помочь Вам в решении проблемы.
Соединение нескольких устройств через SPI

SPI: Master&Slaves. Источник картинки
Довольно часто при создании различных самоделок на основе микроконтроллера Arduino разработчики как бы «приделывают к телу руки и ноги», то есть присоединяют некую периферию, которая управляется с центрального микроконтроллера. Однако иногда возникают такие ситуации, когда необходимо соединить «два мозга друг с другом», то есть соединить два микроконтроллерa. Об этом мы и поговорим в этой статье.
Для коммуникации существует несколько вариантов, и один из них называется SPI.
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный синхронный стандарт передачи данных в режиме полного дуплекса, предназначенный для обеспечения простого и недорогого высокоскоростного сопряжения микроконтроллеров и периферии. SPI также иногда называют четырёхпроводным (англ. four-wire) интерфейсом.
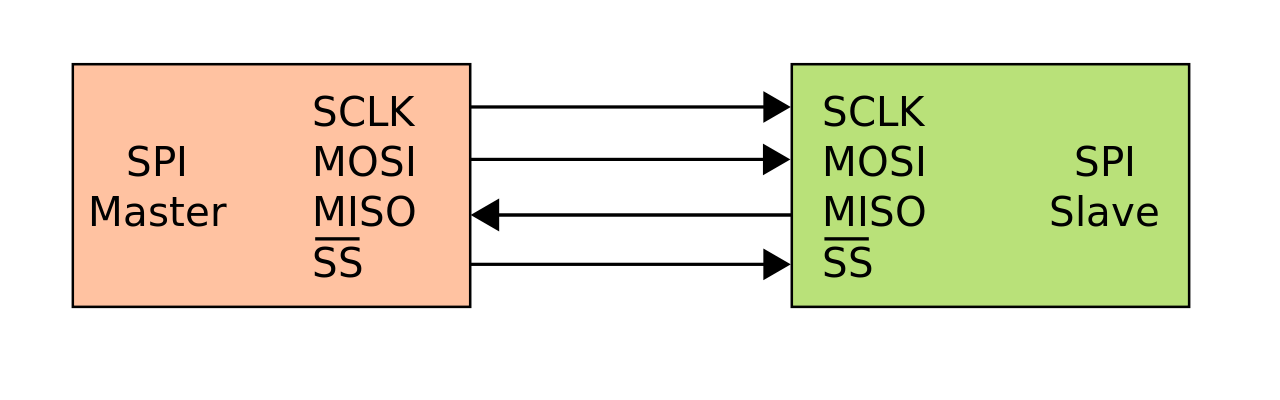
Автор: Cburnett, Источник картинки
В отличие от стандартного последовательного порта (англ. standard serial port), SPI — это синхронный интерфейс, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая (ведомая) периферия синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» (англ. chip select) на ведомой микросхеме.
Периферия, которая не была выбрана процессором, не будет принимать участия в передаче по SPI.
Интерфейс
В SPI используются четыре цифровых сигнала:
- MOSI — выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому.
- MISO — вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
- SCLK или SCK — последовательный тактовый сигнал (англ. Serial Clock). Служит для передачи тактового сигнала для ведомых устройств.
- CS или SS — выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select).
- MISO: SOMI, SDO (на устройстве), DO, DON, SO, MRSR.
- MOSI: SIMO, SDI (на устройстве), DI, DIN, SI, MTST.
- SCLK: SCK, CLK, SPC (SPI serial port clock).
- SS: nCS, CS, CSB, CSN, NSS, nSS, STE, SYNC.
Синхронизация в SPI
Частота следования битовых интервалов в линиях передачи данных определяется синхросигналом SCK, который генерирует ведущее устройство, ведомые устройства используют синхросигнал для определения моментов изменения битов на линии данных, при этом ведомые устройства никак не могут влиять на частоту следования битовых интервалов.
Как в ведущем устройстве, так и в ведомом устройстве есть счётчик импульсов синхронизации (битов). Счётчик в ведомом устройстве позволяет последнему определить момент окончания передачи пакета. Счётчик сбрасывается при выключении подсистемы SPI, такая возможность всегда имеется в ведущем устройстве. В ведомом устройстве счётчик обычно сбрасывается деактивацией интерфейсного сигнала SS.
Так как действия ведущего и ведомого устройства тактируются одним и тем же сигналом, то к стабильности этого сигнала не предъявляется никаких специальных требований, за исключением ограничения на длительность полупериодов, которая определяется максимальной рабочей частотой более медленного устройства. Это позволяет использовать SPI в системах с низкостабильной тактовой частотой, а также облегчает программную эмуляцию ведущего устройства.
Приём и передача данных в SPI
Передача осуществляется пакетами. Длина пакета, как правило, составляет 1 байт (8 бит), при этом известны реализации SPI с иной длиной пакета, например, 4 бита. Ведущее устройство инициирует цикл связи установкой низкого уровня на выводе выбора подчинённого устройства (SS) того устройства, с которым необходимо установить соединение. При низком уровне сигнала SS:
- схемотехника ведомого устройства находится в активном состоянии,
- вывод MISO переводится в режим «выход»,
- тактовый сигнал SCLK от ведущего устройства воспринимается ведомым и вызывает считывание на входе MOSI значений, передаваемых от ведущего битов и сдвиг регистра ведомого устройства.
Подлежащие передаче данные ведущее и ведомое устройства помещают в сдвиговые регистры. После этого ведущее устройство генерирует импульсы синхронизации на линии SCLK, что и приводит к взаимному обмену данными. Передача данных идёт бит за битом от ведущего по линии MOSI и от ведомого по линии MISO.
Передача осуществляется, начиная со старших битов, но некоторые производители допускают изменение порядка передачи битов программными методами. После передачи каждого пакета данных ведущее устройство, в целях синхронизации ведомого устройства, может перевести линию SS в высокое состояние.
Режимы работы интерфейса SPI
Возможны четыре режима синхронизации. Режим определяется комбинацией бит CPHA и CPOL:
- CPOL = 0 — исходное состояние сигнала синхронизации — низкий уровень.
- CPOL = 1 — исходное состояние сигнала синхронизации — высокий уровень.
- CPHA = 0 — выборка данных производится по переднему фронту (переключению) сигнала синхронизации. То есть по переключению из основного в противоположное ему.
- CPHA = 1 — выборка данных производится по заднему фронту (переключению) сигнала синхронизации.То есть по переключению обратно к основному из противоположного.
- режим 0 (CPOL = 0, CPHA = 0),
- режим 1 (CPOL = 0, CPHA = 1),
- режим 2 (CPOL = 1, CPHA = 0),
- режим 3 (CPOL = 1, CPHA = 1).
Топология систем связи на базе SPI
В простейшем случае к ведущему устройству подключено единственное ведомое устройство и необходим двусторонний обмен данными. В таком случае используется трёхпроводная схема подключения. Интерфейс SPI позволяет подключать к одному ведущему устройству несколько ведомых устройств, причём подключение может быть осуществлено несколькими способами.
Первый способ дает возможность реализовать радиальную структуру связи (топология типа «звезда»), его принято считать основным вариантом подключения нескольких ведомых устройств:
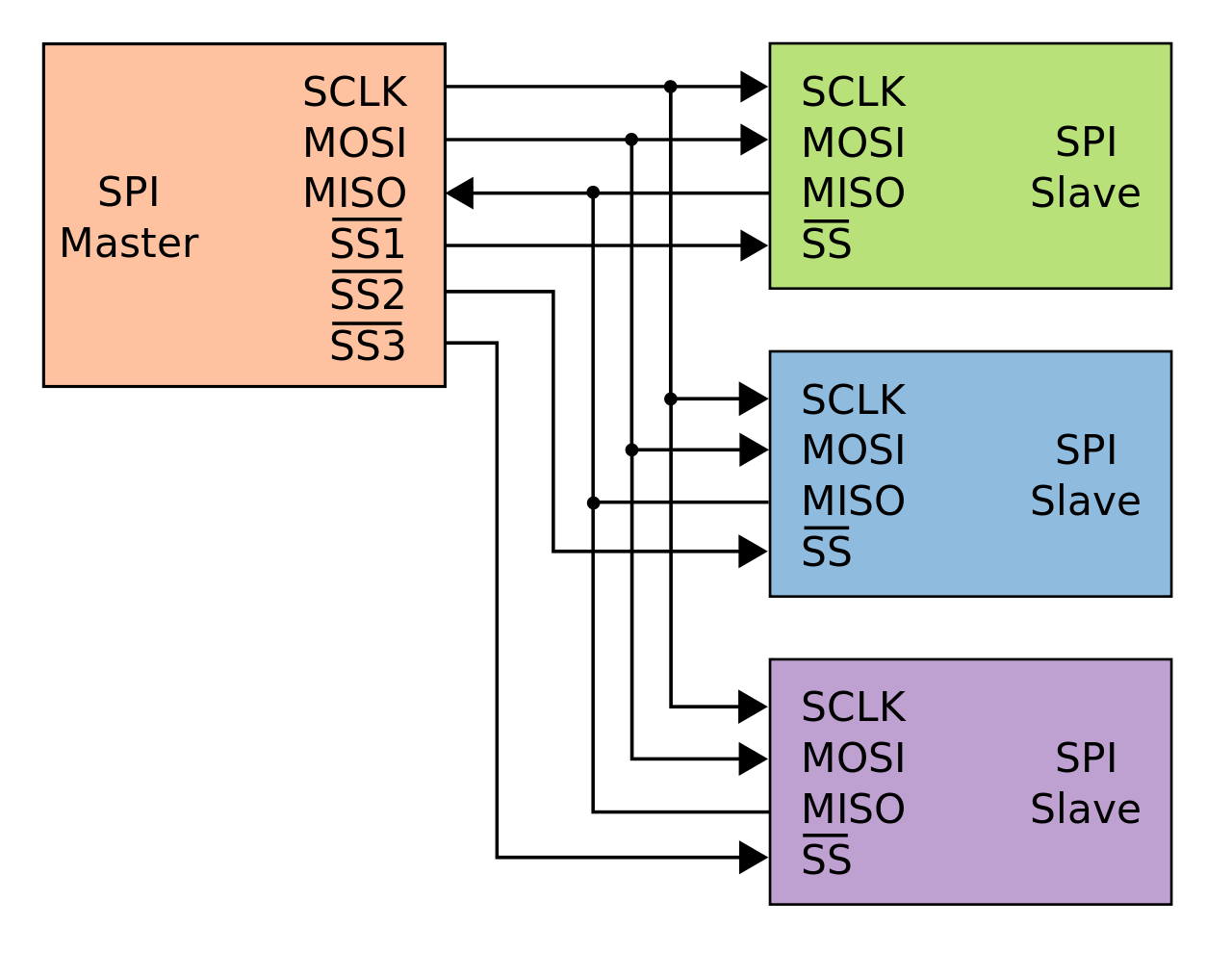
Автор: Cburnett, Источник картинки
В этом случае для обмена более чем с одним ведомым устройством, ведущее устройство должно формировать соответствующее количество сигналов выбора ведомого устройства (SS). При обмене данными с ведомым устройством, соответствующий ему сигнал SS переводится в активное (низкое) состояние, при этом все остальные сигналы SS находятся в неактивном (высоком) состоянии. Выводы данных MISO ведомых устройств соединены параллельно, при этом они находятся в неактивном состоянии, а перед началом обмена один из выходов (выбранного ведомого устройства) переходит в активный режим.
Второй способ позволяет выполнять структуру связи типа «кольцо»:

Автор: Cburnett, Источник картинки
В данном случае для активации одновременно нескольких ведомых устройств используется один сигнал SS, а выводы данных всех устройств соединены последовательно и образуют замкнутую цепь. При передаче пакета от ведущего устройства этот пакет получает первое ведомое устройство, которое, в свою очередь, транслирует свой пакет следующему ведомому устройству и так далее. Для того чтобы пакет от ведущего устройства достиг определённого ведомого устройства, ведущее устройство должно отправить ещё несколько пакетов.
Преимущества и недостатки интерфейса SPI
Преимущества
- Полнодуплексная передача данных по умолчанию.
- Более высокая пропускная способность по сравнению с I²C или SMBus.
- Возможность произвольного выбора длины пакета, длина пакета не ограничена восемью битами.
- Простота аппаратной реализации.
- Используется только четыре вывода, что гораздо меньше, чем для параллельных интерфейсов.
- Однонаправленный характер сигналов позволяет при необходимости легко организовать гальваническую развязку между ведущим и ведомыми устройствами.
- Максимальная тактовая частота ограничена только быстродействием устройств, участвующих в обмене данными.
Недостатки
- Необходимо больше выводов, чем для интерфейса I²C.
- Ведомое устройство не может управлять потоком данных.
- Нет подтверждения приёма данных со стороны ведомого устройства (ведущее устройство может передавать данные «в никуда»).
- Нет определённого стандартом протокола обнаружения ошибок.
- Отсутствие официального стандарта, что делает невозможным сертификацию устройств.
- По дальности передачи данных интерфейс SPI уступает таким стандартам, как UART и CAN.
- Наличие множества вариантов реализации интерфейса.
- Нет поддержки горячего подключения устройств.
Скетч ниже предназначен для управления AD5206, многоканальным цифровым потенциометром. Устройство является достаточно интересным и служит для изменения сопротивления в цепи электронным способом, а не вручную. Если кому интересно, можете почитать подробные спецификации этого потенциометра здесь.
Одним из его применений может быть изменение яркости светодиодов за счёт плавной регулировки сопротивления.
Говоря о технических особенностях этого устройства, можно сказать, что этот цифровой потенциометр имеет возможность установки 256 позиций и является шестиканальным (то есть поддерживает 6 подключаемых устройств, например, светодиодов). Его возможности позволяют заменить механические потенциометры, номиналами 10, 50 или 100 кОм.
Каждый из 6 переменных резисторов потенциометра выведен на корпус микросхемы в виде 3 контактов, и логика подключения к ним ничем не отличается от подключения обычных переменных резисторов.
Назначение пинов на корпусе микросхемы можно посмотреть на рисунке ниже:
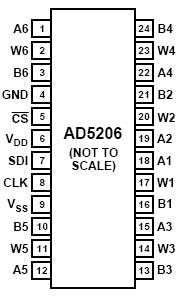
Источник картинки
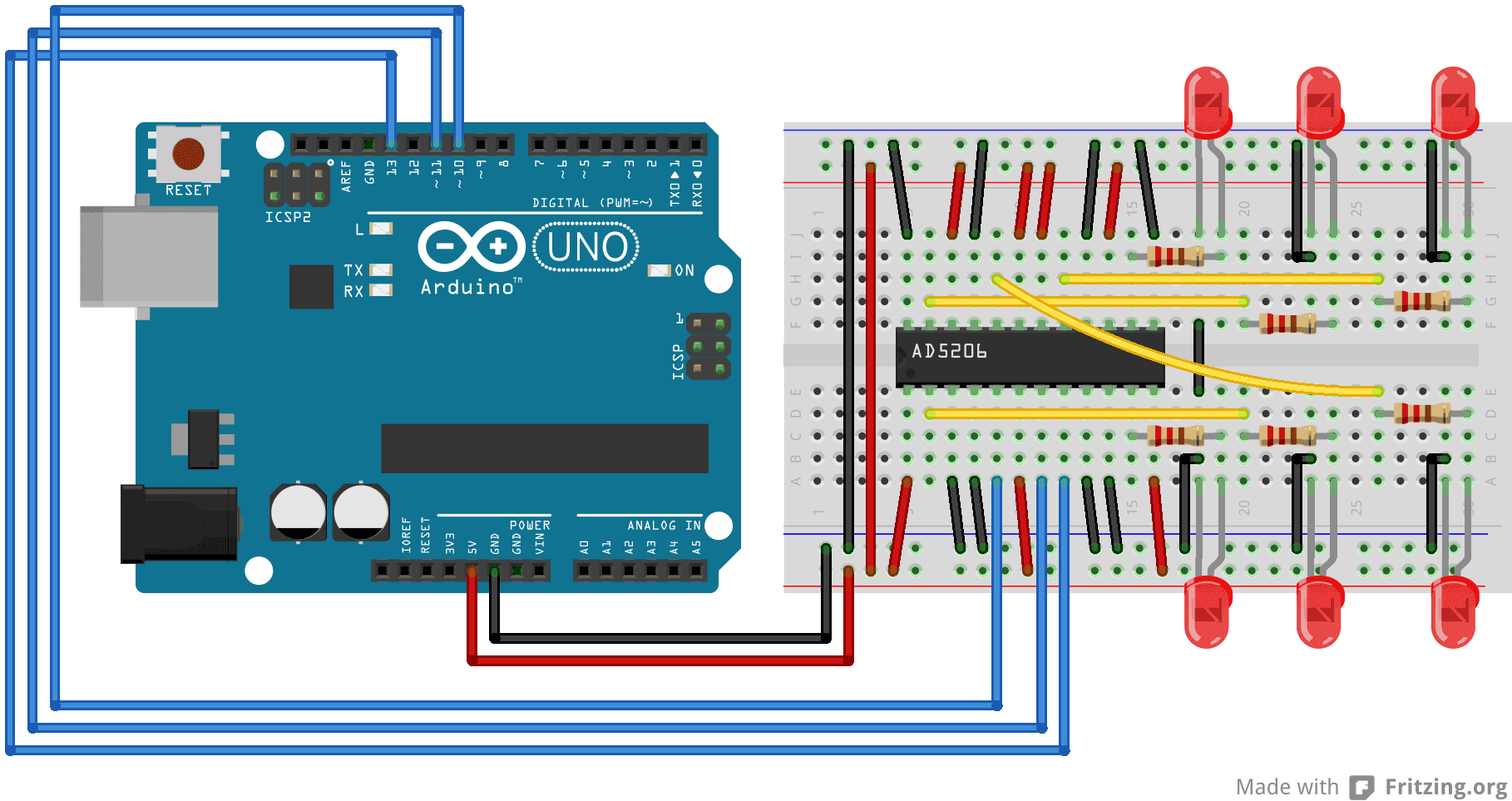
Принципиальную схему соединений светодиодов с микросхемой и пинами Arduino Uno можно увидеть на рисунке ниже:
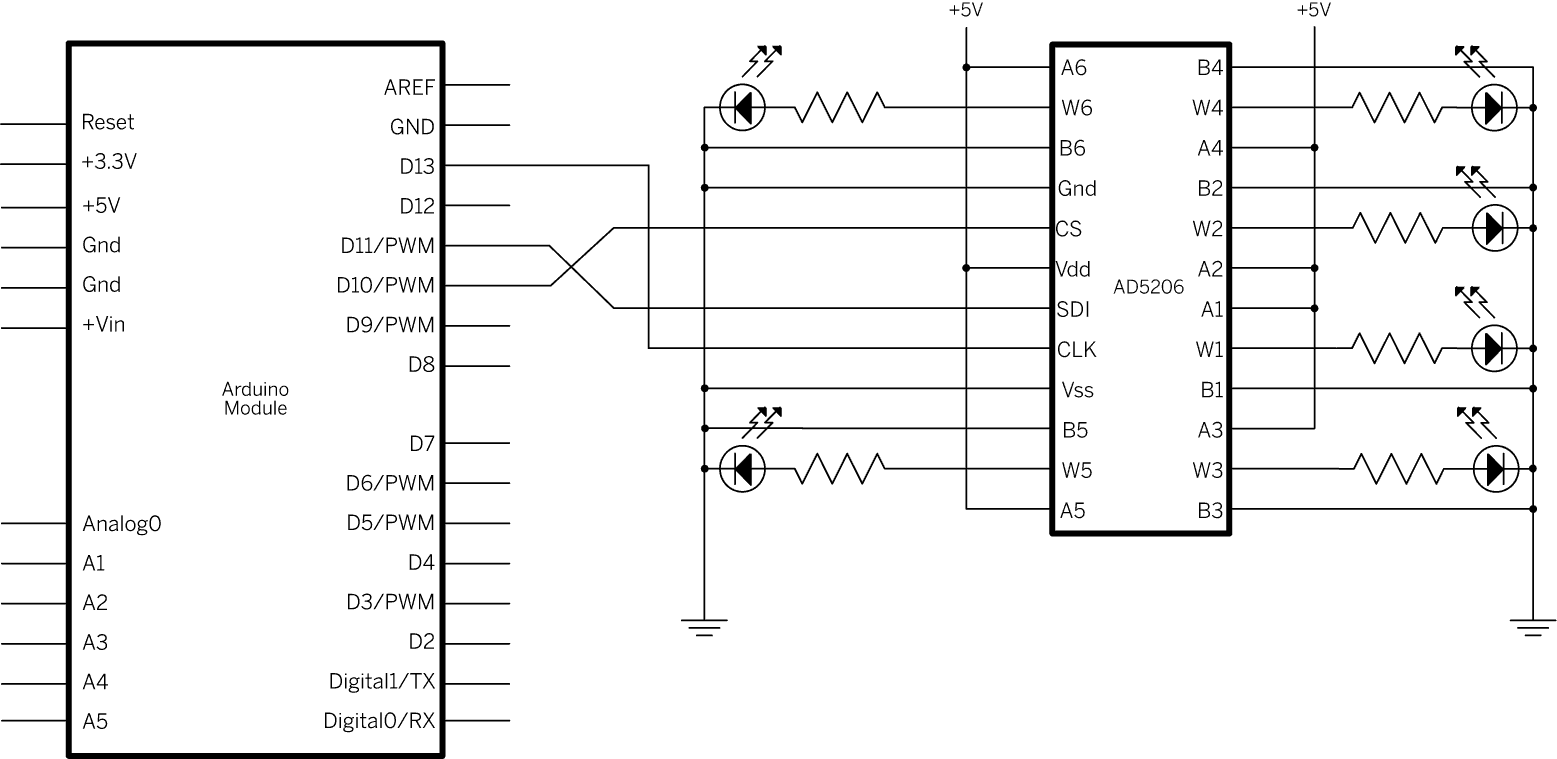
Источник картинки
Источник картинки
Код довольно простой, он реализует сказанное выше и работает следующим образом: плавно изменяется сопротивление на каждом из 6 каналов, пробегая по каждой из 256 позиций, заставляя светодиоды сначала плавно ярко «разгореться», а потом — также плавно погаснуть. Все требующиеся пояснения содержатся в комментариях к коду.
Как мы уже упоминали в самом начале, интерфейс SPI позволяет не только управлять каким-то ещё одним устройством, но и осуществлять полноценную связь в рамках модели ведущий/ведомый между двумя и более ардуинами.
Код, приведённый ниже, работает следующим образом: ардуины связаны друг с другом через SPI. Каждая из них имеет подключённую кнопку-замыкатель. Если происходит нажатие кнопки на ведущем устройстве — включается белый диод на подчинённой ардуине. И, соответственно, если нажимается кнопка на ведомом устройстве, то загорается красный светодиод на ведущей ардуине. Сам пример взят здесь, можете почитать более подробно, если интересно. Все требующиеся пояснения содержатся в комментариях к коду.
Результат работы кода:
Из интересных моментов в этом примере, на мой взгляд, можно выделить, что используется делитель частоты синхронизации SPI. В данном случае используется делитель на 8, то есть связь между ардуинами осуществляется на скорости в 2 МГц (однако значение по умолчанию обычно равно SPI_CLOCK_DIV4, одна четверть от частоты контроллера).
Всего возможны 7 вариантов делителей частоты:
- SPI_CLOCK_DIV2
- SPI_CLOCK_DIV4
- SPI_CLOCK_DIV8
- SPI_CLOCK_DIV16
- SPI_CLOCK_DIV32
- SPI_CLOCK_DIV64
- SPI_CLOCK_DIV128
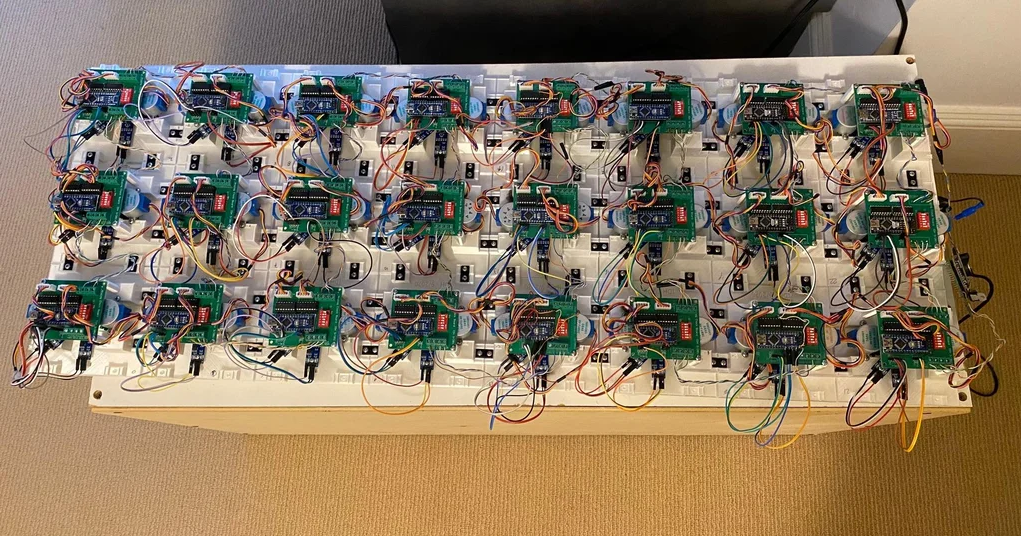
Электронная начинка:
Источник картинки
Результат сборки:
В этой самоделке используется взаимодействие мастера и множества слейвов, которые работают синхронно и образуют вращающимися стрелками текущее время. Кому интересно более подробно почитать о проекте, может это сделать здесь.
Правда следует оговориться, что здесь для взаимодействия использован более продвинутый способ, где применяется интерфейс I2C, который тратит в 2 раза меньшее количество линий (2 против 4 у SPI). Хотя теоретически эта самоделка вполне могла быть выполнена и с использованием протокола SPI, однако тогда бы количество соединений критически выросло (видимо, именно поэтому автором и был выбран другой, более лаконичный на количество выводов способ).
С кодом этой реализации можно ознакомиться здесь.
Подытоживая, хочу сказать, что возможности протокола SPI не ограничиваются только перечисленными выше примерами. Однако если попытаться обобщить, то основными его назначениями, на мой взгляд, являются возможность расширить количество доступных контактов в рамках самоделок, а также разгрузить используемые микроконтроллеры, «сбрасывая» выполняющуюся задачу на подчинённых.
Как правильно подключать HDD SATA/IDE или Ошибка: no ide master h.d.d. detected press f1 to resume, что делать?

Данная ошибка связана с неправильным подключением жёсткого диска. Поэтому исходя из этого расскажу вам как правильно подключать жесткий диск SATA/IDE.
Правильное подключение жёсткого диска.
Самыми распространёнными интерфейсами современных жёстких дисков являются SATA, а для чуть устаревших интерфейс IDE. SATA производительней чем IDE.
IDE интерфейс
Вот так выглядят IDE разъёмы…
На каждый IDE контроллер можно подключить два устройства. Это может быть HDD и CD/DVD привод, либо два HDD, либо два CD/DVD привода. Как правило контроллеры обозначаются как IDE0 и IDE1.
При подключении двух дисков необходимо назначить им приоритеты. Другими словами необходимо указать системе главный диск — master и ведомый диск — slave. ( иногда они обозначаются как device 0 — главный и device 1 — ведомый ). Как назначаются эти самые приоритеты? При помощи перемычки, джампера ( на англ. jumper ).

На наклейке HDD диска как правило производители указывают как нужно поставить перемычку, чтобы диск стал главным либо ведомым.
Устройства, к этим разъёмам подключаются через IDE шлейф. Шлейфы бывают 40 контактные и 80 контактные. По режиму подключения шлейфы бывают ещё Y-образные. Они работают в режиме cable select. На таких шлейфах имеется три разъёма — два на конце шлейфа ( первый master, второй slave ) и один по середине. Центральный разъём подключается к системной плате, а крайние разъёмы к устройствам.

При том крайние разъёмы автоматически одному устройству присваивает приоритет master, а другому slave.
Операционная система устанавливается на главный диск. Если диск, на который установлена ОС подключён к slave разъёму, то ОС грузится не будет.
SATA интерфейс
SATA разъёмы на материнской плате выглядят следующим образом.
Устройства к SATA разъёму подключаются при помощи шнура со штекерами. На штекерах имеются специальные «ключи», направляющие, в виде буквы «Г» которые не позволяют неправильно их подключить. К одному разъёму SATA, в отличие от IDE можно подключить только одно устройство. Разъёмы обозначаются как SATA0 — первый, SATA1 — второй, SATA2 — третий и т.д. Таким образом в SATA распределяются приоритеты между жесткими дисками. В BIOS’е каждому разъёму можно вручную задать приоритет. Для этого надо зайти в раздел Boot Sequence или Boot Device Priority. Это может понадобится в случаях когда автоматически приоритет задается не правильно.
Теперь давайте перейдём к решению проблемы с ошибкой no ide master h.d.d. detected press f1 to resume.
Ошибка: no ide master h.d.d detected: press f1 to resume
Данная ошибка появляется при неправильном подключении HDD. Эта ошибка указывает на то, что в системе отсутствует HDD подключённый к разъёму master. Значит HDD работает в режиме SLAVE, т.е. подключён к разъёму SLAVE. Нужно, чтобы, хотя бы один HDD работал в режиме master — главный. Проблема эта решается простым переключением HDD в соседний разъём SATA, или если у вас ATA кабель простым переставлением перемычки на master. Вот и всё пожалуй.
Послесловие:
Данная статья надеюсь поможет новичкам лучше ориентироваться в железе компьютера и решать проблемы возникающие с подключением жестких дисков самостоятельно. Если хотите знать какие ещё ошибки выдаёт BIOS в начале загрузки прочтите статью При загрузке компьютер (система) требует нажать F1 (Press F1). Почему?. Кроме ошибок на мониторе компьютер издаёт ещё звуки, которые также указывает на наличие либо отсутствие проблем с железом. Если хотите распознавать и правильно интерпретировать их значение советую прочитать статью Какие сигналы подает компьютер и что они значат?
Источник https://infotechnica.ru/pro-kompyuteryi/o-nakopitelyah-informatsii/peremychki-na-zhestkom-diske/
Источник https://lumpics.ru/why-does-a-hard-drive-have-jumper/
Источник https://ritorika.com.ua/informacija/7/slave-master-kak-pravilno-stavit